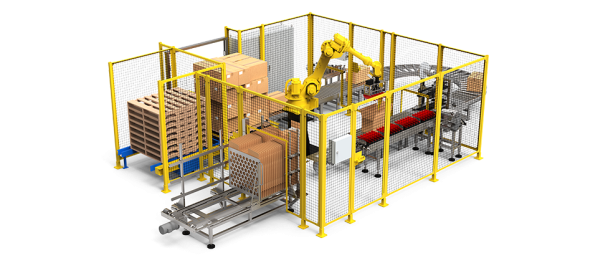


TT-1400RELP Robotic Case Erector, Loader and Palletizer
The TT-1400RELP is a Robotic Top Load Case Packer and Palletizer that can reach speeds up to 2 cases per minute. The robotic arm with specific EOAT is utilized for case erecting, case loading, and palletizing applications, which makes this solution ideal for a business that values flexibility and compactness over speed. Designed and built for case packing of stand-up pouches, this particular model is perfect for the casing of any pouch-packed product, whether it’s coffee, flour, sugar, candy, or stick packs.
Literature
Related Products
-

TT-1200T Top-Load Case Packer
View Product -

TT-1300S Side-Load Case Packer
Automatic Side-Load Case Packer
The TT-1300S Case Packing Machine provides flexible collation systems and high-speed product handling. Models are available with pre-stacking case conveyors, tape and glue closing, user-friendly HMI operator interface, and small overall footprints. Increase your efficiency with a TT-1300S corrugated case packer with manual, robotic, or collation system case loading.
View Product -

TT-1400 Modular Case Packer
Top Load Case Packer
The TT-1400 Case Packer features adjustable speeds and an overall compact footprint, and it can reach speeds up to 70 cases per minute. It consists of three autonomous modules: the case erecting module, the case loading module, and the case sealing module.
View Product